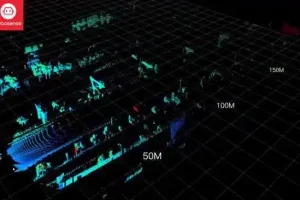
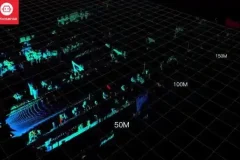
这是国内首个专注于工业级点云处理的实战教程。课程从PCL基础讲起,逐步深入到进阶技术,涵盖点云滤波、分割、配准及重建等核心模块。特别值得一提的是,课程加入了CVPR2021的最新研究成果——PointDSC算法,让学员能够掌握前沿技术。课程还附赠全套源码课件,助力学员从理论过渡到实践,全面提升点云处理能力。无论是初学者,还是想进一步提升的开发者,都能从课程中获得宝贵的实战经验和行业洞见。...

 夸克网盘
夸克网盘 10积分
10积分














本课程由3D视觉工坊推出,是国内首个面向工业级实战场景的点云处理系统教程。课程内容覆盖从基础理论到进阶应用的全流程,并配有完整源码与课件,适合希望深入掌握点云技术的工程师、研究人员及高校学生。
课程核心章节一览:
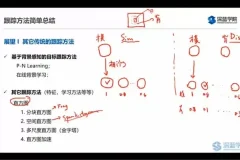
课程以实战为导向,每个章节均结合工业级案例进行讲解,帮助学员快速将理论转化为工程能力。特别补充的PointDSC模块,基于特征匹配的点云配准方法,代表了当前学术界的前沿成果,为进阶学习提供有力支撑。
无论是从事自动驾驶、机器人导航、三维测量,还是从事AR/VR、逆向工程等领域,这套课程都能提供系统、扎实的点云处理知识体系。

 补充-PointDSC-基于特征匹配的点云配准方法(CVPR2021).mp4306.46MB三维点云-第01章节-绪论.mp4299.55MB三维点云-第02章节-PCL基础(上篇).mp4405.02MB三维点云-第02章节-PCL基础(下篇).mp4309.37MB三维点云-第03章节-PCL中的数据读取及可视化.mp4331.16MB三维点云-第04章节-点云滤波.mp4267.24MB三维点云-第05章节-点云关键点、特征描述与提取.mp4211.23MB三维点云-第06章节-点云分割算法.mp4508.86MB三维点云-第07章节-点云配准基础.mp4362.54MB三维点云-第08章节-点云多帧配准.mp4267.57MB三维点云-第09章节-点云重建模块.mp4184.77MB三维点云-第10章节-点云处理进阶模块.mp4174.62MB
补充-PointDSC-基于特征匹配的点云配准方法(CVPR2021).mp4306.46MB三维点云-第01章节-绪论.mp4299.55MB三维点云-第02章节-PCL基础(上篇).mp4405.02MB三维点云-第02章节-PCL基础(下篇).mp4309.37MB三维点云-第03章节-PCL中的数据读取及可视化.mp4331.16MB三维点云-第04章节-点云滤波.mp4267.24MB三维点云-第05章节-点云关键点、特征描述与提取.mp4211.23MB三维点云-第06章节-点云分割算法.mp4508.86MB三维点云-第07章节-点云配准基础.mp4362.54MB三维点云-第08章节-点云多帧配准.mp4267.57MB三维点云-第09章节-点云重建模块.mp4184.77MB三维点云-第10章节-点云处理进阶模块.mp4174.62MB